
城市汽車保有量的增加,使得泊車時駕駛員駕駛汽車的轉動空間普遍減小,對于經驗不足的駕駛員,在平行泊車以及倒車入庫時,常常感到力不從心。本文針對平行泊車問題,基于模糊邏輯控制理論設計了自動泊車轉向控制器,有助于駕駛員實現平行泊車。
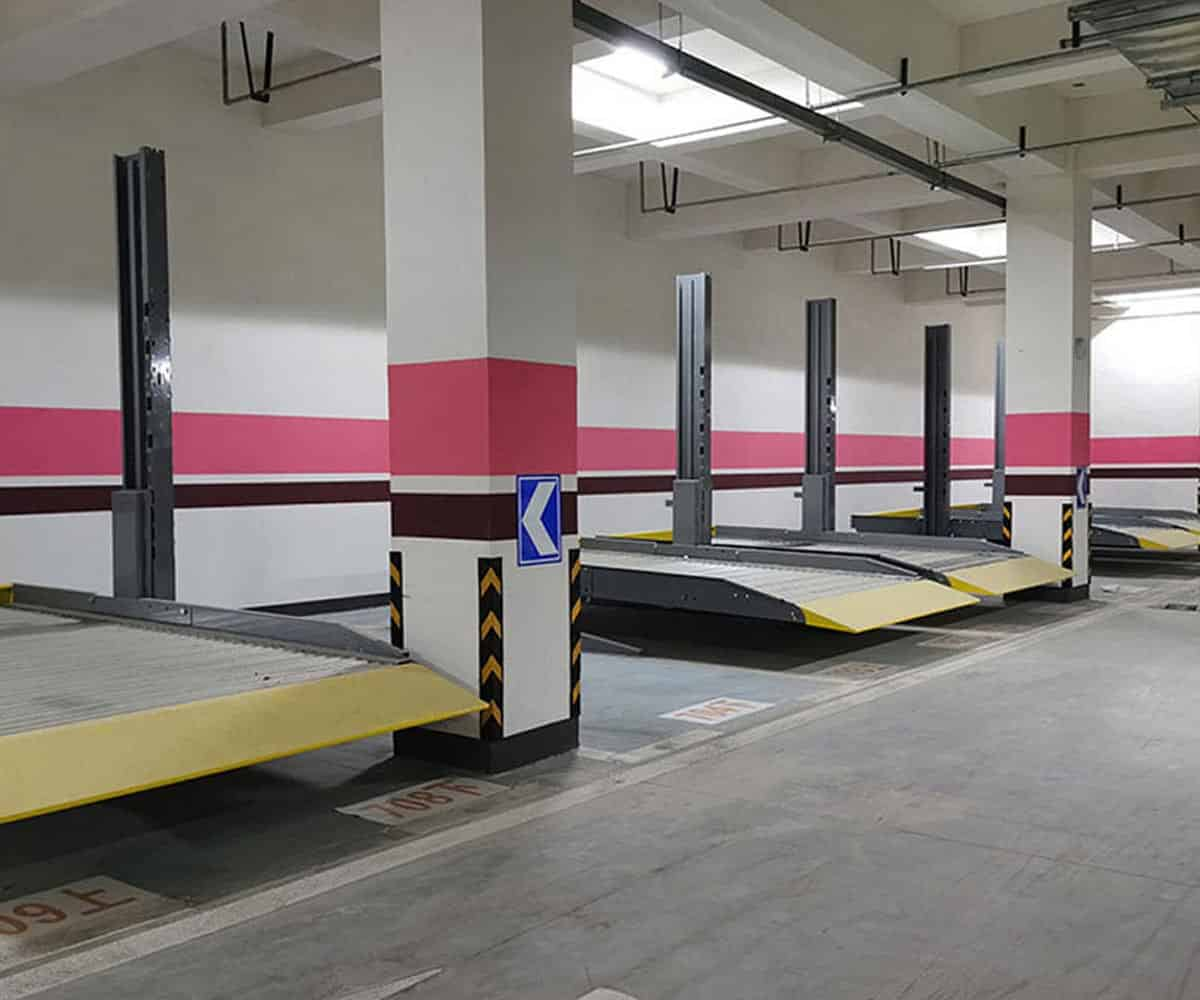
國內外解決立體車庫加盟自動泊車的方法大致分為兩個方向:①路徑規劃:根據停車空間的幾何形狀,車輛的動力學模型,碰撞約束等,預先規劃到達泊車位置的幾何路徑,通過控制算法跟蹤該路徑。②應用模糊邏輯和神經網絡等算法模擬駕駛技術成熟的駕駛員的泊車行為,通過控制汽車轉向角和相對停車位的位置,控制汽車實現泊車。
路徑規劃基本屬于開環控制策略,通常無法補償汽車運行中引起的位置誤差,即便可以通過反復的前進與倒退運動消除位置誤差,但同時也會增加時間以及運行成本;基于神經網絡與模糊算法等生成的控制策略屬于閉環控制,可以及時的彌補運行中產生的位置誤差。本文以模糊邏輯控制理論為依據設計平行泊車控制策略,不僅減小了汽車運行中引起的位置誤差,同時避免了應用神經網絡產生的高計算量,而且有較好的控制效果。

聲明: 本網站所發布文章,部分信息來自于互聯網,如有侵權,請聯系刪除(QQ:382666579)
貴州 貴陽 六盤水 遵義 安順 畢節 銅仁 黔西南 黔東南 黔南 南明 云巖 花溪 烏當 白云 觀山湖 開陽 息烽 修文 清鎮 鐘山 六枝 水城 盤州 紅花崗 匯川 播州 桐梓 綏陽 正安 道真 務川 鳳岡 湄潭 余慶 習水 赤水 仁懷 西秀 平壩 普定 鎮寧 關嶺 紫云 七星關 大方 黔西 金沙 織金 納雍 威寧 赫章 碧江 萬山 江口 玉屏 石阡 思南 印江 德江 沿河 松桃 興義 興仁 普安 晴隆 貞豐 望謨 冊亨 安龍 凱里 黃平 施秉 三穗 鎮遠 岑鞏 天柱 錦屏 劍河 臺江 黎平 榕江 從江 雷山 麻江 丹寨 都勻 福泉 荔波 貴定 甕安 獨山 平塘 羅甸 長順 龍里 惠水 三都水 四川 重慶 云南 甘肅 陜西 湖北 湖南 廣西
![機械立體車庫租賃,立體停車設備回收[成都昆明重慶貴陽智能停車位廠家報價]停車場安裝拆除改造,四川萊貝停車設備有限公司](http://www.rhrcase.net/skin/web/wchat.png "機械立體車庫租賃,立體停車設備回收[成都昆明重慶貴陽智能停車位廠家報價]停車場安裝拆除改造,四川萊貝停車設備有限公司")

 全國服務熱線
全國服務熱線









![機械立體車庫租賃,立體停車設備回收[成都昆明重慶貴陽智能停車位廠家報價]停車場安裝拆除改造,四川萊貝停車設備有限公司](http://www.rhrcase.net/skin/web/footlogo.png "機械立體車庫租賃,立體停車設備回收[成都昆明重慶貴陽智能停車位廠家報價]停車場安裝拆除改造,四川萊貝停車設備有限公司")
 川公網安備51010502014830號
川公網安備51010502014830號